華為新專利可使自動駕駛車輛的避障策略更具備類人性 華為公布自動駕駛避障專利觀點(diǎn)
觀察君 ") 2024-10-25 23:45
2024-10-25 23:45
導(dǎo)讀
天眼查知識產(chǎn)權(quán)信息顯示,10月25日,華為技術(shù)有限公司申請的“避障的方法、智能設(shè)備以及系統(tǒng)”專利公布。
天眼查知識產(chǎn)權(quán)信息顯示,10月25日,華為技術(shù)有限公司申請的“避障的方法、智能設(shè)備以及系統(tǒng)”專利公布。
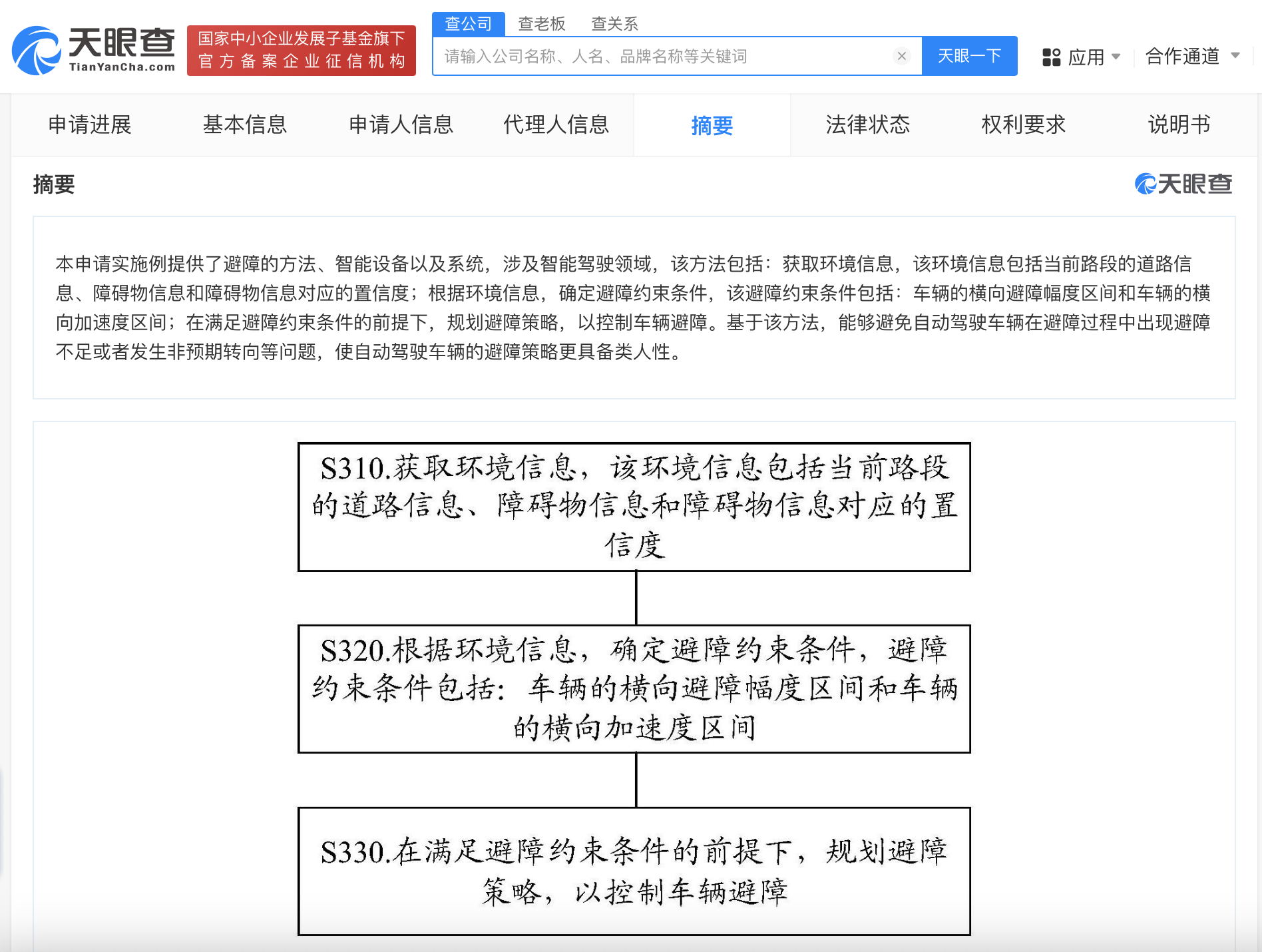
摘要顯示:該方法包括獲取環(huán)境信息,該環(huán)境信息包括當(dāng)前路段的道路信息、障礙物信息和障礙物信息對應(yīng)的置信度;根據(jù)環(huán)境信息,確定避障約束條件,該避障約束條件包括車輛的橫向避障幅度區(qū)間和車輛的橫向加速度區(qū)間;在滿足避障約束條件的前提下,規(guī)劃避障策略,以控制車輛避障。
該方法能夠避免自動駕駛車輛在避障過程中出現(xiàn)避障不足或者發(fā)生非預(yù)期轉(zhuǎn)向等問題,使自動駕駛車輛的避障策略更具備類人性。

1.TMT觀察網(wǎng)遵循行業(yè)規(guī)范,任何轉(zhuǎn)載的稿件都會明確標(biāo)注作者和來源;
2.TMT觀察網(wǎng)的原創(chuàng)文章,請轉(zhuǎn)載時務(wù)必注明文章作者和"來源:TMT觀察網(wǎng)",不尊重原創(chuàng)的行為TMT觀察網(wǎng)或?qū)⒆肪控?zé)任;
3.作者投稿可能會經(jīng)TMT觀察網(wǎng)編輯修改或補(bǔ)充。
